HIWIN arm_six-axis robotic arm faucet surface polishing
| --Share to Friend--- |
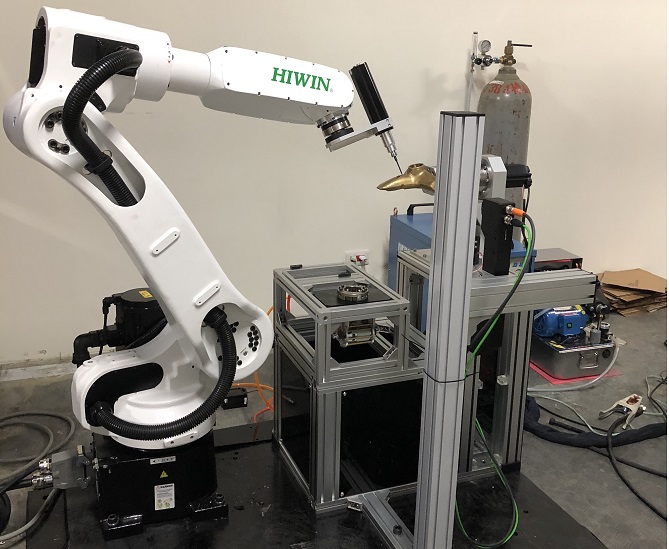
HIWIN arm_six-axis robotic arm faucet surface polishing
1. Because the individual dimensional error of different water hardware is very large, it cannot be processed by the general Robot arm position movement control path to do the polishing.. 2. We use a laser scanner for approximate 3D modeling understand all dimension. 3. After we have all the dimensions before polishing A. Planning of the path B. Calculation of normal direction C. polishing force management D. Polishing head change planning
For video demonstration please link to HIWIN arm_six-axis robotic arm faucet surface polishing
Please contact us for any inquiries, thank you. E-mail: sales@quadrep.com.tw |
| --Go Back--- |